„Cnych ludzi pamięć z popiołów wydobyć i ku pożytkowi potomnych zachować”
Quad 500
-

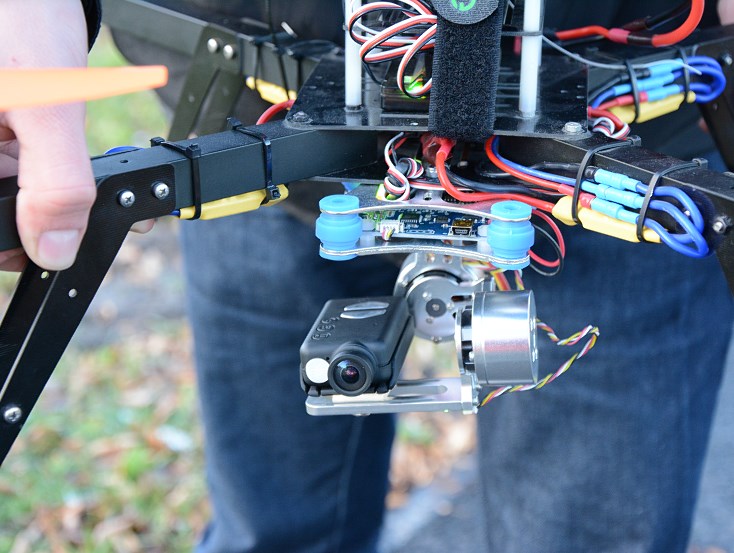
- Kolejny w stajni naszej modelarni model quadrocoptera, tym razem jest to model większej maszyny, klasy 500. Pierwotnym przeznaczeniem modelu jest nauka lotów na wielowirnikowcach, do którego doskonale się nadaje. Drugim jego zadaniem jest nauka podstaw obsługi stabilizacji kamery (tzw. gimbal), próby mniej lub bardziej dynamicznych ujęć oraz obserwacja okolicy z innej perspektywy. Model na tę chwilę obsługiwany jest przez jedną aparaturę, jednak docelowo używane będą dwie. Jedna do sterowania modelem a druga do obsługi z poziomu obserwatora gimbala. Ma to umożliwić wykonywanie dokładniejszych ujęć, gdy pilot może skupić się na samym locie a operator kamery na odpowiednim ujęciu szczegółów filmu video. Czas lotu w układzie bez gimbala wynosi ok. 11 minut.
- Wyposażenie modelu:
-

- Silniki - 4 x RCTimer kV 900
- Regulatory - 4 x 30A RCTimer
- Śmigła - 11x4,7 plastikowe GWS
- Kontroler lotu - ArduPilot 2.6 z GPS Drotek M8N (obsługa GLONASS)
- Rama - aluminiowe ramiona 10x10 oraz płyty wykonane z odpowiednio ażurowanego laminatu
- Zasilanie - akumulatory 4s 14.8V 3300mAh 30C(główny) oraz 3s 1300mAh do zasilania gimbala
- Odbiornik - FrSky D8R-XP
- Sprzęt do transmisji wideo:
-

- Kamera - Mobius (tymczasowo)
- Nadajnik - ImmersionRC 600mW 5.8GHz (docelowo)
- Anteny - koniczynki (polaryzacja do okólna) 5.8GHz (docelowo)
- Gogle lub monitor - do kontroli obrazu i ujęć z powietrza